注意事項
このマニュアルはB3Mシリーズと通信を行うコマンドのリファレンスマニュアルです。
内容についての著作権など法的な権利は、近藤科学株式会社にあります。
このコマンドをご使用になった結果については責任は負いません。
誤字脱字などについては弊社窓口までお申し出ください。ただし、内容についてのご質問及びプログラミングについてのご質問については、お答え出来ない場合がございますのであらかじめご了承ください。
なお本マニュアルの内容、各種名称については予告なく変更される場合があります。
1.B3Mサーボについて
製品説明
B3Mはブラシレスモータや非接触磁気式エンコーダを使用し、高信頼性、長寿命を目指したサーボです。
ケースのトップとミドルにアルミを採用、さらにアルミギヤに硬質アルマイト処理を施した強度の高いギヤを採用することで、高い耐久性を実現しました。
制御プログラムを一新し、高機能で使いやすいシステムを実装しました。PID制御の設定や温度制限や動作電圧制限などの各種リミッターの搭載しました。それらをシンプルな6種類のコマンドだけで制御可能です。
制御は、位置制御、速度制御から選択できます。位置制御では、片側320°の広範囲にわたって角度を指定することができます。また、制御方式も4-1-4多項式補完法など5種類の軌道生成タイプから選択できます。
製品特徴と概要
・高精度12bit磁気式エンコーダーを採用
非接触磁気式エンコーダーは接触部分がないので長寿命。
さらに12bitの解像度で最小分解能は0.088°(0~4095)
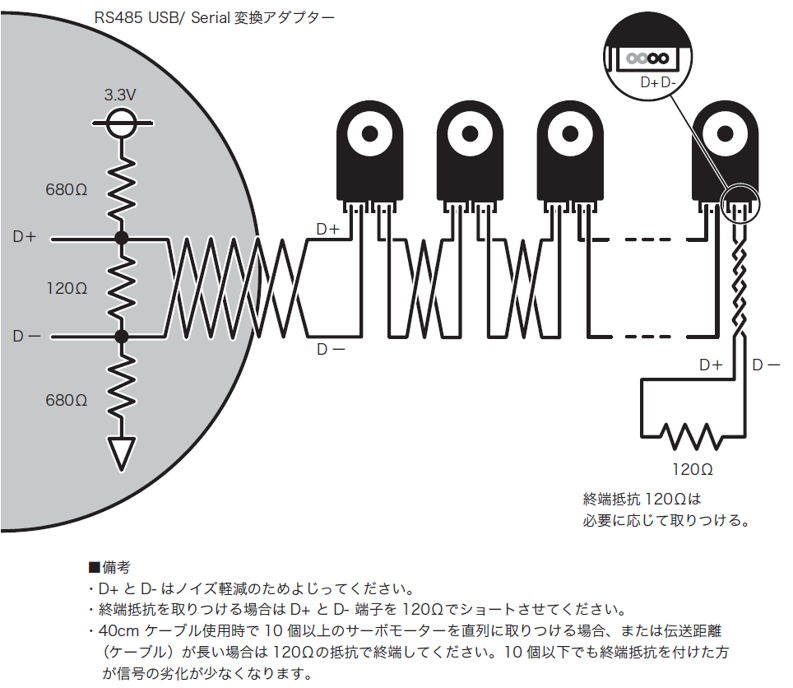
・信頼のRS-485規格
通信はRS-485規格に準拠しています。差動信号のためノイズに強く、3Mbpsの高速通信が可能。デイジーチェーン接続で最大255個接続可能です(理論値)。
・6種類の省コマンドでシンプルな構成
僅か6種類のコマンドのみでサーボの制御が可能です。
メモリーマップドIOを採用しているので、メモリーのデータを読み書きするだけで実際にサーボモーターが動作します。
・マルチキャストコマンド
サーボごとにID番号を設定できます。また、ID=255はブロードキャストIDとして使用。デイジーチェーン接続された全てのサーボモーターを同時にコマンド実行させることが可能です。
・位置ゲイン、微分ゲイン、積分ゲイン
位置制御・速度制御時はPID制御パラメーターを調整可能です。また、ゲインプリセット機能を使えば3種類のゲインをあらかじめ登録しておくことができますので、プリセット番号ですばやくゲインを変更することができます。
・システムエラー検知機能・ソフトウェアリミット
入力電圧やMCU温度、モーター温度、モーターロックなど各種システムエラーをメモリー上に保存しています。また、安全のためのリミット機能を搭載しています。モーターやMCUの温度に対して制限をかけることで、故障の原因を減らすことが可能です。
製品構成
サーボ本体

【付属品】
<単品>
XH接続ケーブル(400mm) ×1本
アルミクランプホーン ×1個
<5個セット>
XH接続ケーブル(400mm) ×5本
アルミクランプホーン ×5個


(左)XH接続ケーブル(400mm)
(右)アルミクランプホーン
用意するもの
サーボの制御に必要なパーツをご紹介します。
RS485USB/シリアル変換アダプター
No.02133 ¥6,000
サーボと通信するための中継用アダプターです。

HV電源スイッチハーネス
No.01213 ¥800
上記のアダプターと電源を接続するためのスイッチ付きケーブルです。
電源
B3Mサーボに合った電源として9~12Vのバッテリー、またはAC電源などを準備してください。
・SB-1040-A・・・サーボ1個当たり最大2.8Aの電流容量が必要です。
・SC-1040-A・・・サーボ1個当たり最大3.6Aの電流容量が必要です。
・SC-1170-A・・・サーボ1個当たり最大5.4Aの電流容量が必要です。
USBケーブル
PCからサーボにコマンドを送る場合は、こちらの準備もお願いします。コネクタは、USB-A ⇔ mini-B です。
オプション製品

XHコネクター用ハブ typeA
No.02136 ¥2,500
複数のサーボをつなぐ際に使用します。
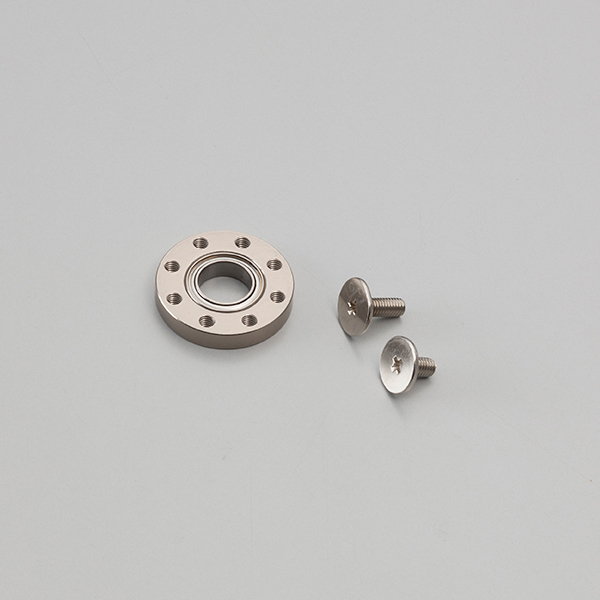
ベアリング付アルミフリーホーン
(B3M/KRS-6000シリーズ用)
No.02137 ¥1,200
ボトムケース側につけるホーンです。

サーボ用4本ケーブルセット
No.02135 ¥1,000
ケーブルセット、コネクターセットを組み合わせて自由な長さのケーブルを作成することができます。
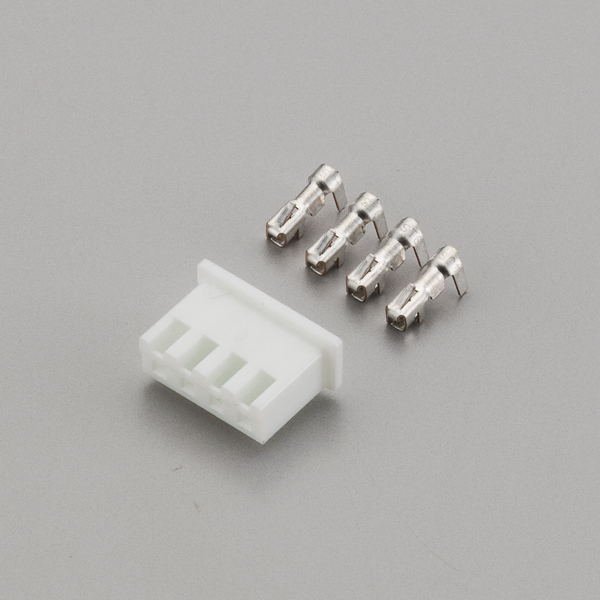
XHケーブル用コネクターセット
No.02134 ¥1,500

サーボアーム【B3M-1000シリーズ用】(2セット入り)
No.02150 ¥3,000
B3M-1000シリーズ用サーボアームです。B3M用ベアリング付きアルミフリーホーンと組み合わせて使います。他のフレームとビス止めで組み合わせることが可能です。

サーボブラケットS【B3M-1000シリーズ用】(2セット入り)
No.02151 ¥3,000
B3M-1000シリーズ用サーボブラケットです。B3M本体のサイドに取り付けることができます。他のフレームとビス止めで組み合わせることが可能です。

サーボブラケットB【B3M-1000シリーズ用】(2セット入り)
No.02152 ¥3,000
B3M-1000シリーズ用サーボブラケットです。B3M本体のボトムに取り付けることができます。他のフレームとビス止めで組み合わせることが可能です。
フレーム使用例

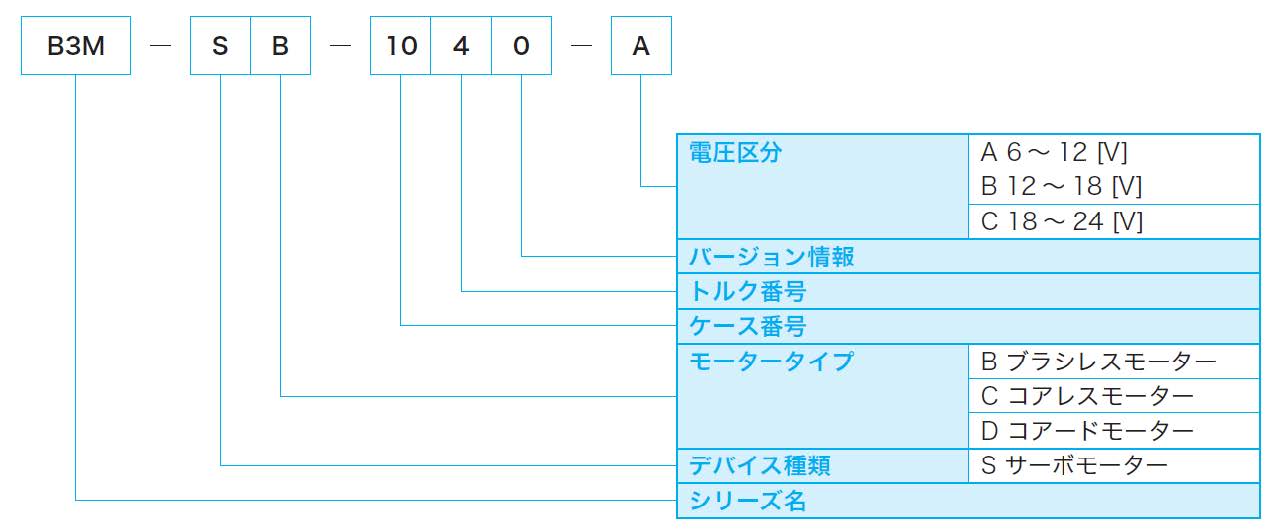
サーボの種類とスペック
B3Mシリーズは、大きく二種類のサーボに分かれます。ブラシレスモータを採用したB3M-SBと、コアレスモータのB3M-SCです。ブラシレスモータは、損耗部品のブラシが無いため長くご使用いただけます。また、コアレスモータは、ハイスペックでありながらSBシリーズに比べ低価格に設定されており、採用しやすい価格を実現しています。
| 項目名 | SB-1040-A | SC-1040-A | SC-1170-A |
| 動作環境温度[℃] | 0~40 | ||
| 動作電圧[V] | 6~12 | ||
| 待機電流(フリーモード時)[mA] | 80 | 68 | 68 |
| ストール電流[A] | 2.8 | 3.6 | 5.4 |
| 最大トルク[Nm] | 4.1 | 4.6 | 7.6 |
| 最大トルク[kgf.cm] | 42 | 47 | 78 |
| 最大連続トルク[Nm] | 2.5 | 2.5 | 4.0 |
| 無負荷回転数[s/60°] | 0.22 | 0.18 | 0.21 |
| 無負荷回転数[rpm] | 45 | 54 | 46 |
| 減速比 | 362.88:1 | 381.2:1 | 362.88:1 |
| モータ種類 | ブラシレス | コアレス | |
| 重量[g] | 86 | 82 | 105 |
| 最大動作角度※1(位置制御) | ±320°(±327.67°) | ||
| その他制御 | 無限回転※2 | ||
| 制御分解能 | 12 [bit]/1round (0〜4095) | ||
| 動作方式 | 位置制御、速度制御、トルク制御 | ||
| 通信方式 | RS485通信準拠、半二重通信 | ||
| 主なパラメータ | ID番号、各種制限項目、PID制御各種ゲイン | ||
| 固有ID数 | 0~ 254(255はブロードキャストIDとして予約) | ||
(12Vで使用した場合のスペック値です)
※1 原点位置からの動作角度(原点位置は任意に設定できます)。
※2 角度を取得する場合は原点位置±180degになります。
B3Mシリーズの見方
LEDの機能
サーボ本体に実装されているLEDの点滅パターンでサーボの状態が確認できます。

LEDは画像の黄色い丸部分にあります。
| 状態 | 点滅パターン |
| 正常 | 点灯 |
| システムエラー | 100ms周期の点滅 |
| モータエラー | 250ms周期の点滅 |
| UARTエラー | 500ms周期の点滅 |
| コマンドエラー | 1秒周期の点滅 |
| 電源OFF | 消灯 |
※エラーの解除はOPTIONのCLEARビットに1をセットしてください。
※Normalモード時はLED点滅の優先度が低いため、規則正しく点滅しません。FreeモードまたはHoldモードでエラーステータスを確認してください。
コネクタとピン配置
S4B-XH-A側接続図
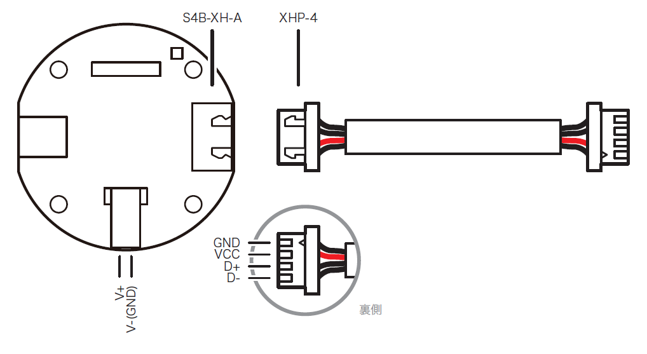
サーボ側接続図
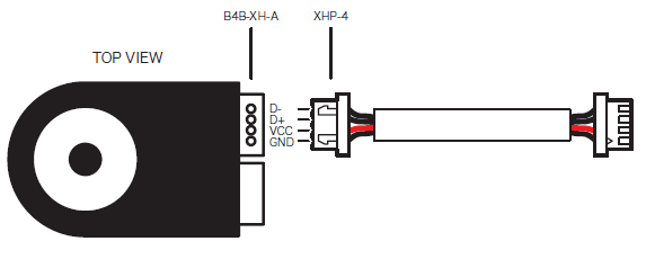
ケーブル:XH接続ケーブル(400mm)(No.02144)
コネクタセット:XHケーブル用コネクターセット(30セット入り)(No.02134)
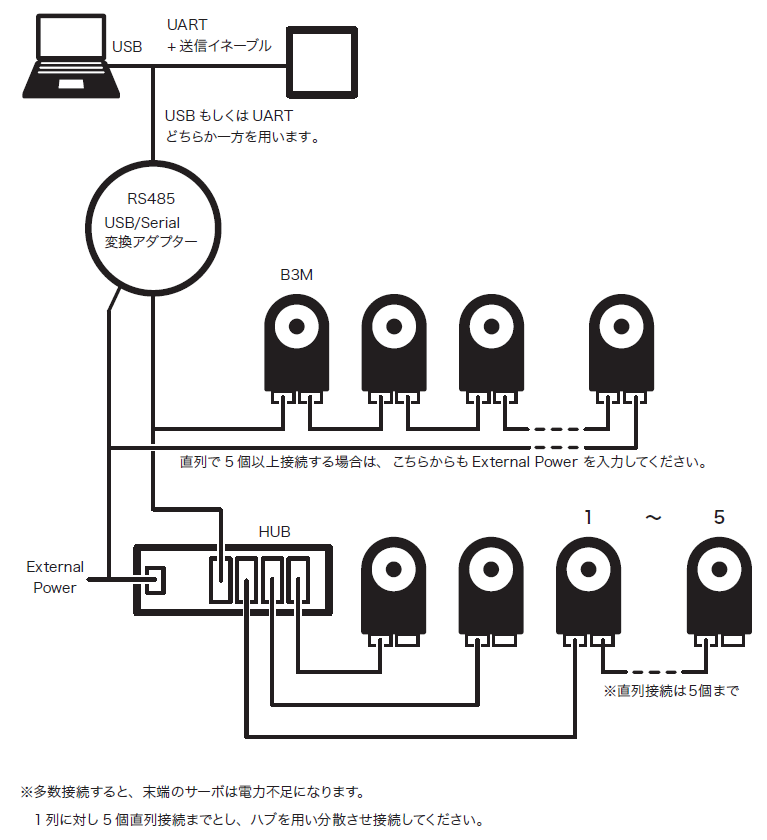
システム構成
B3Mは以下のシステム構成で制御することが可能です。コマンドを送るホストは、PCのUSB接続またはマイコンボードのUARTを使用します。RS485USB/シリアル変換アダプターにて中継し、サーボをマルチドロップ接続にて複数個つなぐことが可能です。電源は、USBアダプターから供給することができますし、ハブを挟んでの供給も可能です。
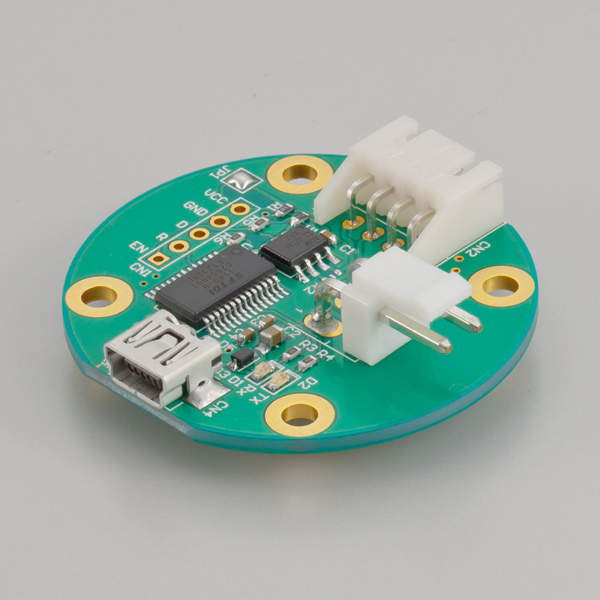
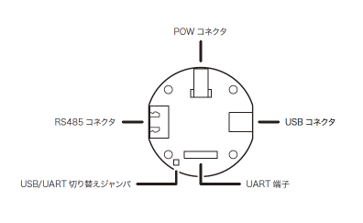
インターフェース
RS485USB/シリアル変換アダプター
このアダプターにて、B3MサーボのRS-485規格に通信を合わせることができます。
PCから直接動作する場合とマイコンのUART端子から制御する場合のどちらにも対応できます。
サーボへの電源供給用の端子も装備しています。
機械特性
| 項目名 | 内容 |
| 使用温度 | 0~40[℃] |
電気・通信特性
| 項目名 | 内容 |
| 接続機器印加電圧 | 接続機器による |
| USB | USB2.0およびUSB1.1 |
| RS485 | |
| 転送モード | 半二重非同期通信 |
| 最大通信速度 | 3 [Mbps](USB使用時) |
| 16 [Mbps](UART使用時) | |
| パス上ノード数 | 最大256まで |
| RS485ライン(A, B) | -8~13 [V] |
| UART接続ピン | |
| Vcc電圧 | +3.0 ~+6.0 [V] |
| R出力電圧 | H: Vcc -0.6 [V] L: 0.4 [V] |
| ENおよびD入力電圧 | 0~+6.0 [V] |
| ロジックレベル | H: 2.0 [V]以上 L: 0.8 [V]以下 |
コネクタ仕様
| 項目名 | 内容 |
| USBコネクタ | USBミニB |
| POWコネクタ | 日本圧着端子製造株式会社 B2PS-VH |
| 1 | V+ (機器用電源) |
| 2 | V- (GND) |
| RS485コネクタ | 日本圧着端子製造株式会社 S4B-XH-A |
| 1 | GND |
| 2 | 電源出力 |
| 3 | A (D+ RS485 Line) |
| 4 | B (D- RS485 Line) |
| UART接続ピン | (2.54 [mm]ピッチで配置) |
| EN | 送信、受信切り替え |
| R | データ受信ピン |
| D | データ送信ピン |
| GND | GND |
| Vcc | ロジックIC用電源(3.0 ~6.0 [V]) |
使用方法
USB通信の場合
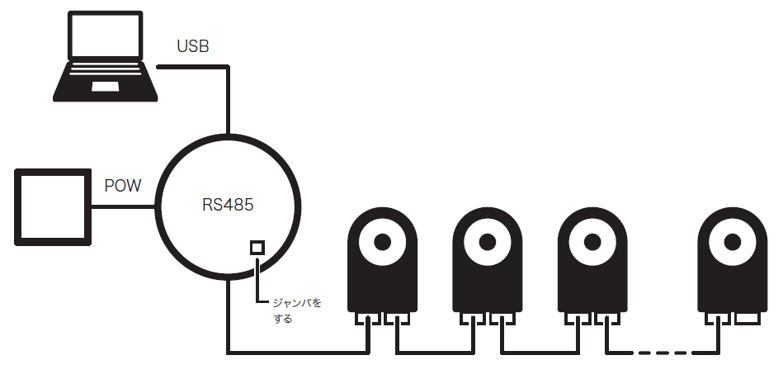
1. JP1を半田でジャンパします(出荷時は接続されています)。
2. PCに接続し、KOドライバをインストールします。ドライバのインストール後は作成された仮想COMポートと通信できます(ドライバのインストール方法は、KO Driverのインストールマニュアルを参照してください)。
3. B3Mマネージャーソフトをインストールします。(マネージャーソフトの使用方法は、B3M Managerマニュアルを参照してください)。
UART通信の場合
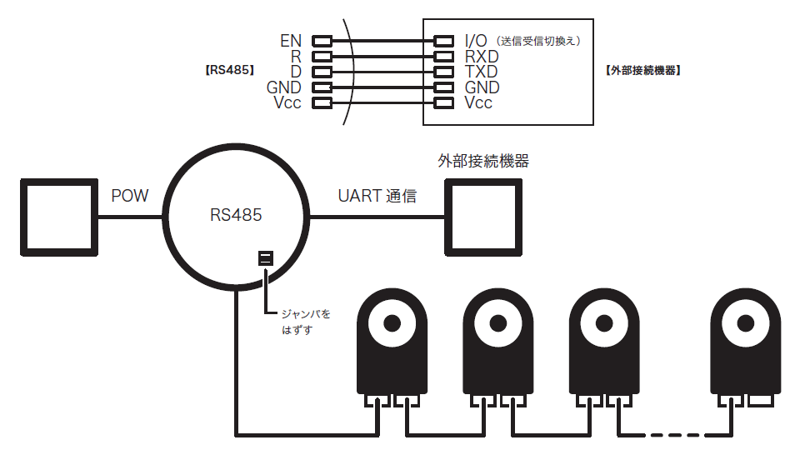
1. JP1の半田ジャンパをはずします。
2. UART端子に外部接続機器を接続します。
3. 外部接続機器から485対応機器にデータを送信する時は、EN端子をHレベル、それ以外はLレベルにしてください。
外部電源使用時
RS485対応機器に電力を供給する場合に使用します。RS485のVcc/GNDラインを使って外部より電力を供給する場合は不要です。
電源
電源は12Vの直流電源またはバッテリーをご用意ください。B3Mに電源を接続する場合は、極性を間違えないように接続してください。必要な電流値(アンペア)は使用するモーターの種類や数などによって変わります。詳しくは使用するモーターの仕様書などをご覧になってください。
 リチウムフェライトバッテリーラインアップ
リチウムフェライトバッテリーラインアップ
ROBOパワーセル F3-850タイプ (Li-Fe)
No.02171 ¥3,000(税別)
ROBOパワーセル F3-1450タイプ (Li-Fe)
No.02172 ¥3,500(税別)
ROBOパワーセル F3-2100タイプ (Li-Fe)
No.02174 ¥4,500(税別)
サーボの最大消費電流
下記の最大消費電流を目安に電源を選択してください。
・SB-1040-A・・・サーボ1個当たり最大2.8Aの電流容量が必要です。
・SC-1040-A・・・サーボ1個当たり最大3.6Aの電流容量が必要です。
・SC-1170-A・・・サーボ1個当たり最大5.4Aの電流容量が必要です。
ご注意ください
B3Mシリーズの電源回路は、ソフトスタート機能が装備されているため、電源の立ち上がりが遅い場合はサーボが正常に起動しない場合があります。安定化電源を電源とする場合は、サーボと電源の間にスイッチを入れ、安定化電源をONにしてからスイッチをONにすると、サーボの起動が安定します。
マルチドロップ接続について
サーボ同士をつなげたマルチドロップ接続が可能です。接続には、XH接続ケーブルがお勧めです。
サーボが複数台になる場合は、ハブを使用することもできます。
XHコネクター用ハブ typeA
No.02136 ¥2,500
2.通信仕様について
シリアル通信設定
B3Mシリーズは、ホストより送信されるコマンドにより、サーボの動作やサーボのステータスを取得する事ができます。
| 名称 | 機能 |
| 通信形式 | RS-485準拠 |
| 転送モード | 反二重非同期式通信(調歩同期式通信) |
| 通信速度 |
115200~3000000bps |
| スタートビット | 1bit |
| データビット | 8bit |
| パリティビット | なし |
| ストップビット | 1bit |
| 備考 | ※通信速度2Mbps以上で通信を行った時、通信エラーになる場合があります。その場合、ストップビットを2にすることで改善されることがあります。 ※コマンドは2バイト分以上の間隔が空くと一連のコマンドとして認識されません。 ※連続して通信を行う場合は通信間隔を2バイト分のデータ+220us以上に空けて下さい。これは送受信データ量および通信速度により変わります。 |
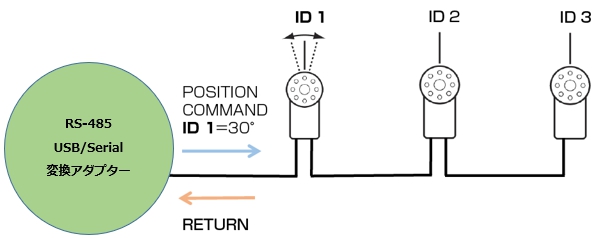
通信モード
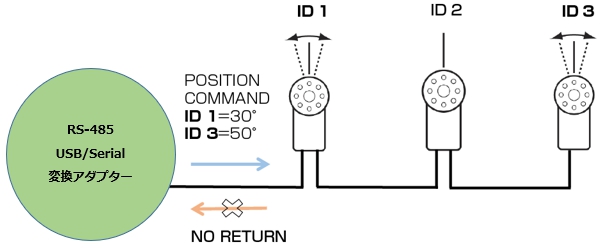
B3Mは通常の1対1の通信(シングルモード)に加え、一度に多数のデバイスと通信するマルチモードを搭載しています。モード切替は、1台目のIDと各データに続けて2台目以降のIDとデータを連続して送信することで自動的にマルチモードとして送信されます。
| 名称 | 内容 |
| シングル | 1個のIDまたはブロードキャストIDを指定してコマンドを実行します。 |
| マルチ | 2個以上のIDを指定してコマンドを実行します。 ブロードキャストIDは使用できません(無視されます)。 |
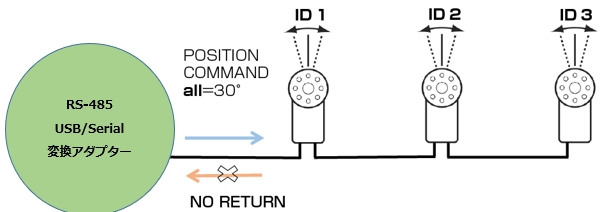
ブロードキャストIDについて
・ID 255を使用すると全てのデバイスに一斉に命令を送ることができます。
・ブロードキャストIDは特殊なID番号で255に固定。
※マルチコマンドおよびブロードキャストIDを指定したときは返信データはありません。
シングル(1個のサーボと通信する)
マルチ(複数のサーボと通信する)
ブロードキャスト(すべてのサーボと通信する)
データ構造
データ構造は、ホストより送信する【送信フォーマット】と、サーボより送信する【返信フォーマット】の2種類あります。
シングルモード
【送信フォーマット】
| 内容 | SIZE | COMMAND | OPTION | ID | S-DATA | SUM |
| バイト | 1 | 1 | 1 | 1 | 0 ~ N | 1 |
【受信フォーマット】
| 内容 | SIZE | COMMAND | STATUS | ID | R-DATA | SUM |
| バイト | 1 | 1 | 1 | 1 | 0~N | 1 |
マルチモード
【送信フォーマット】
| 内容 | SIZE | COMMAND | STATUS | ID | S-DATA | SUM |
| バイト | 1 | 1 | 1 | 1 | 0~N※1 | 1 |
※1 マルチモードでは、S-DATAに連結して複数のサーボIDに対してコマンドを送ることができます。
【返信フォーマット】
・返信データはありません。
マルチモードでのフォーマットについては、「3.コマンド詳細」をご覧ください。
データフォーマットの名称説明
各フォーマットのそれぞれの項目を紹介します。「3.コマンド詳細」と合わせてご覧ください。
【SIZE】データ長
フォーマット(SIZE~SUM)の長さを指定します。最大256バイトです。
【COMMAND】コマンド
B3Mは、シンプルな6種類のコマンドによりサーボ及びデータ制御ができます。
「3.コマンド詳細」にて、各コマンドの使用例を紹介しています。
| 名称 | CODE | 機能 |
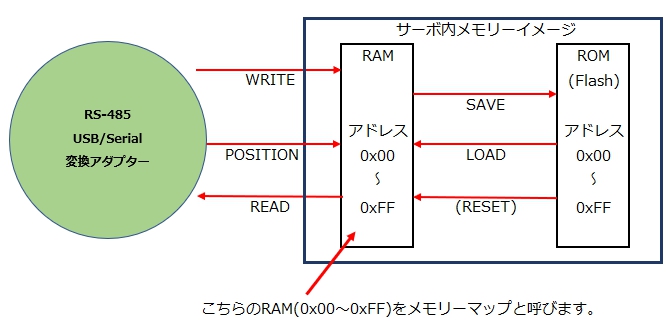
| LOAD | 0x01 | ROMの内容をIOマップ(RAM)に読み出します |
| SAVE | 0x02 | IOマップ(RAM)の内容をROMに保存します |
| READ | 0x03 | IOマップ(RAM)のアドレス指定でデバイスからデータ(RAM)を読み込みます |
| WRITE | 0x04 | IOマップ(RAM)のアドレス指定でデバイスにデータ(RAM)を書き込みます |
| RESET | 0x05 | デバイスを再起動します |
| POSITION | 0x06 | サーボモーターのポジションを変更します |
※READコマンドで取得したデータは通信中にデータの値が変化している場合があります。
【OPTION】オプション / 【STATUS】ステータス
送信フォーマットのOPTIONで指定したエラー項目を、返信フォーマットのSTATUSにて状態を返信します。また、OPTIONでステータスエラーのクリアの指示を行います。
詳細は、「4.オプション/ステータス詳細」をご覧ください。
【ID】ID番号
サーボなどデバイスのID番号です。
【S-DATA】データ(送信フォーマット)
各コマンドの送信データをS-DATAとして送信します。
RESETでは時間(TIME)をS-DATAで送信しますが、これは何秒後にリセットをかけるかを指定できます。
POSITIONは、角度と時間を送ることで動作角と目標に到達するための時間を指定することができます。ただし、軌道生成タイプ(0x29)がNomal以外に設定されているときのみ時間の設定が有効になります。Noemalの場合は、目標移動時間の設定値に関係なく最速で動きます。
マルチモードのときは、LOADとSAVEに複数のサーボIDを入れることで同時に動作指示をだすことができます。WRITEでは複数のデータとIDを交互に送ることで、同時に複数台に書き込みが可能です。RESETでは指定した複数のサーボを同時にリセットをかけることができます。POSITIONも同様です。READは、マルチモードに対応していません。
S-DATAの詳細な使用方法は「3.コマンド詳細」を参照してください。
| 名称 | 内容 | シングルモード | マルチモード |
| LOAD | S-DATAは使用しません | データなし | 1番目のIDに続けて2番目以降のサーボID番号を指定します(ID2・・・IDn) |
| SAVE | S-DATAは使用しません | データなし | 1番目のIDに続けて2番目以降のサーボID番号を指定します(ID2・・・IDn) |
| READ | 読み出す情報のアドレスとバイト数 | アドレス(ADDRESS)+バイト数(LENGTH) | |
| WRITE | 書き込む情報とアドレス | 角込みデータ(DATA)+アドレス(ADDRESS) | “1番目の書き込みデータ(DATA1) +2番目以降の書き込みID(IDn) +2番目以降の書き込みデータ(DATAn) +書き込みの先頭アドレス(ADDRES) +指定するデバイスの数(COUNT)” |
| RESET | TIME(何秒後にリセットするか) | 時間(TIME) | 2番目以降のサーボID番号(ID2・・・IDn)+時間(TIME) |
| POSITION | 角度と到達までの時間を指定 | 角度(POS)+時間(TIME) | “1番目のPOS(POS1) +2番目以降のID(IDn) +2番目以降の角度(POSn) +時間(TIME)” |
【ADDRESS】アドレス
WRITE(書き込み)、READ(読み出し)コマンドで対象となるデータのメモリーマップ上のアドレスを指定します。4BYTEデータなど複数に渡って連続してアドレスがある場合は、先頭アドレスを指定します。詳細は、「7.メモリーマップについて」をご参照ください。
【LENGTH】長さ
READコマンドの読み取るR-DATAのバイト数を指定します。
【COUNT】カウント
WRITEコマンドの指定する対象デバイスのID数(台数)を指定します。
【POS】ポジション(Position)データ
SET POSITIONコマンドで角度を指定します。
【TIME】タイム
RESETでは、リセットがかかるまでの時間を指定できます。
SET POSITIONコマンドで軸の到達時間を指定します。ただし、軌道生成タイプ(0x29)がNomal以外に設定されているときのみ時間の設定が有効になります。「Noemal」の場合は、目標移動時間の設定値に関係なく最速で動きます。
【SUM】チェックサム
SUMを除くコマンドのデータ総和の下位1バイトです。
3.コマンド詳細
コマンド一覧
シンプルな6種類のコマンドによりサーボ及びデータの制御ができます。
シングルモードでは、送信後にデバイスからの返事を受け取ることができます。この中に、デバイスの状態を知ることができる「STATUS」が含まれていますので、デバイスが正しく動作できているかなどの状態を確認することができます。READ以外は、マルチモードにて複数のサーボに同時に命令を送ることができます。ただし、マルチモードではデバイスからの返事を受け取ることはできません。
| 名前 | モード | コマンド | 機能 |
| LOAD | 送信(S/M) | 0x01 | ROMの内容をメモリーマップ(RAM)に読み出します |
| 返信 | 0x81 | “STATUSとIDが返ってきます。 ※マルチモード時は返事はありません” |
|
| SAVE | 送信(S/M) | 0x02 | メモリーマップ(RAM)の内容をROMに保存します |
| 返信 | 0x82 | “STATUSとIDが返ってきます。 ※マルチモード時は返事はありません” |
|
| READ | 送信(Sのみ) | 0x03 | “メモリーマップ(RAM)のアドレス指定でデバイスから データ(RAM)を読み込みます” |
| 返信 | 0x83 | 指定したアドレスの読み取ったデータが返ってきます。 | |
| WRITE | 送信(S/M) | 0x04 | “メモリーマップ(RAM)のアドレス指定でデバイスに データ(RAM)を書き込みます” |
| 返信 | 0x84 | “STATUSとIDが返ってきます。 ※マルチモード時は返事はありません” |
|
| RESET | 送信(S/M) | 0x05 | デバイスを再起動します |
| 返信 | – | 返事はありません | |
| POSITION | 送信(S/M) | 0x06 | サーボモーターのポジションを変更します |
| 返信 | 0x86 | “STATUSとID、データ送信時の角度が返ってきます。 ※マルチモード時は返事はありません” |